



水下無人平臺自主探測技術是水下無人平臺完成使命任務的重要保障,在軍事國防領域占有舉足輕重的地位,其研究內容涉及水下無人平臺結構與水動力、水下定位與導航、任務自適應規劃、自主控制、數據傳輸與通信、動力推進、任務載荷、目標自主探測與跟蹤、目標屬性自主判別及共性基礎技術等領域,是當前國際研究的前沿熱點。水下聲學滑翔機屬于水下無人平臺自主探測研究領域,其在環境觀測型水下滑翔機技術基礎上,綜合考慮了平臺電磁兼容性及聲學特性,搭載聲學傳感器及信號處理系統,具備海洋環境噪聲采集、水聲信號采集、聲紋記錄、數據處理及上浮通信等功能,可用于完成敏感海域或拒止區域移動目標自主探測、跟蹤、屬性判別和信息回傳等任務。
一、水下聲學滑翔機研究現狀
⒈國外研究現狀
國外在水下滑翔機集成聲學傳感器方面起步較早,且成果顯著,尤以美國最為突出。
2010年5月7日,葡萄牙科研工作者在西太平洋勞盆地(Laubasin)北部布放搭載水聽器的Slocum水下聲學滑翔機(見圖1),用于監測西馬塔(WestMata)的海下火山,記錄了隨距離變化的聲波振幅,證明了地質變化將使該地區噪聲水平上升。試驗結果表明,水下聲學滑翔機用于水聲監測的效果可以與水下自主水聽器相媲美;2013年5月,葡萄牙阿爾加維大學又在葡萄牙海岸布放了搭載SR-1水聽器的Slocum用于探測水下噪聲,結果表明,其可對水下噪聲進行時間和空間尺度上的有效探測。
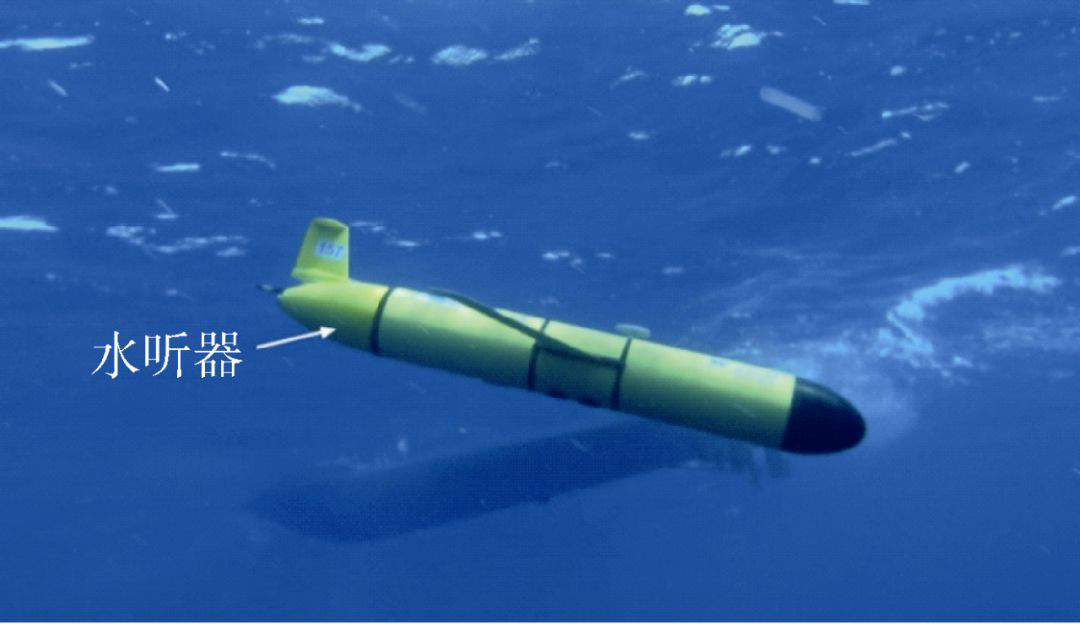
圖1 搭載水聽器的Slocum
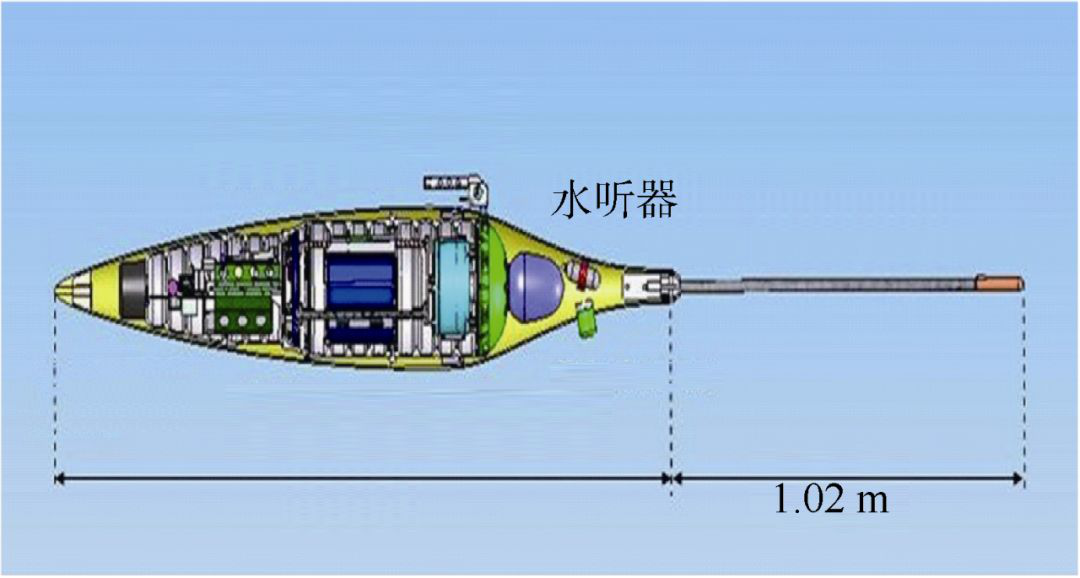
圖2 搭載水聽器的Seaglider
美國研制的Seaglider水下聲學滑翔機尾部艙段集成了5Hz~30kHz全向聲壓水聽器(見圖2),并配有數據采集與存儲設備,聲學設備動態范圍120dB、本底噪聲低至34dB。2006年8月,科研人員在加利福尼亞州蒙特利灣布放了3臺Sea-glider水下聲學滑翔機,共獲取401個剖面、107小時的聲學數據,采集到了藍鯨、座頭鯨和抹香鯨的叫聲。此次試驗航行時間達40天,航行里程達200km,取得了較好的試驗效果。
ANT公司在美國海軍研究辦公室的資助下研制的一款淺海聲學滑翔機ANTLittoralGlider(見圖3),搭載有Reson公司的TC-4033型水聽器和Wilcoxon的矢量水聽器,其獨特的設計特別適合在近海工作。在6年的研制周期內,ANT公司共為美國海軍制造了18套ANTLittoralGlider,累積作業4500小時。

圖3 ANT公司的淺海滑翔機
美國斯克里普斯海洋研究所海洋物理實驗室和華盛頓大學應用物理實驗室合作設計的翼身融合水下聲學滑翔機(XRay和ZRay,見圖4),采用翼身融合結構,可實現翼展水平距離最大化和功率消耗最小化,最大限度地提高其探測和定位能力。該滑翔機利用獨特的翼身融合設計可獲得較快的水下航行速度,使升力面積最大且增加了內部體積,可用于攜帶戰術有關的聲學傳感器,使其適合于警戒和其他遙測任務。
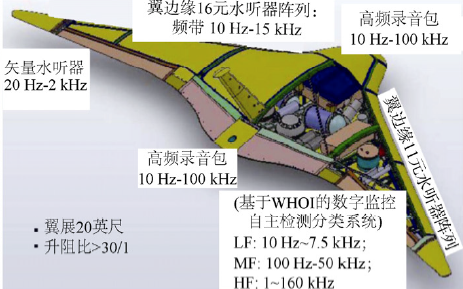
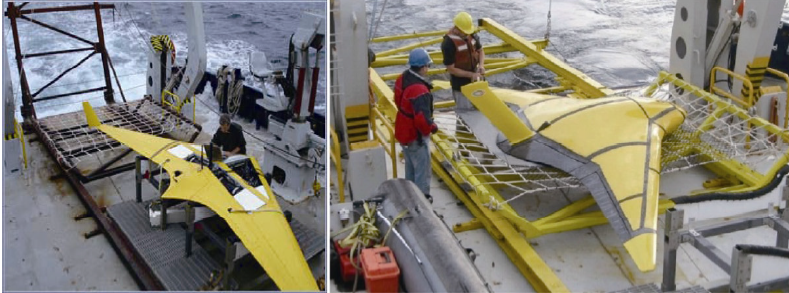
圖4 Xray和Zray水下聲學滑翔器
ZRay的兩機翼前緣中安裝了1個27元水聽器陣列,水聽器工作頻帶10Hz~15kHz,陣列信號輸出到1個實時檢測/定位和記錄系統;該水下聲學滑翔機同時搭載有矢量水聽器,頻率為20Hz~2kHz。除此以外,ZRay還嘗試拖曳1個32元拖曳線列陣,該陣列由太平洋空間和海軍作戰系統中心設計和建造,并將配備1個來自伍茲霍爾海洋研究所的3通道低(10Hz~7.5kHz)、中(100Hz~50kHz)、高(1kHz~160kHz)頻數字監控自主檢測分類系統。
該水下聲學滑翔機可以以1~3kn的航速續航6個月,其設計初衷是用來跟蹤和自動識別海洋哺乳動物,目前已應用于圣地亞哥海底被動聲學自主監測海洋哺乳動物項目。由于其優異的聲學探測性能,ZRay還可用來探測安靜級柴電潛艇,是美軍持久性沿海海底監視網(PlusNet)的一部分。
⒉國內研究現狀
國內在水下滑翔機平臺集成聲學傳感器方面基本與美國保持同步。受國家“863”計劃資助,2014年,中國海洋大學和中科院聲學所聯合研制了一型聲學滑翔機,該型滑翔機的艏部艙段為聲學探測艙,電子系統位于滑翔機電子艙內,二者通過電纜連接,已先后開展了消聲水池、湖上及海上試驗(見圖5)。
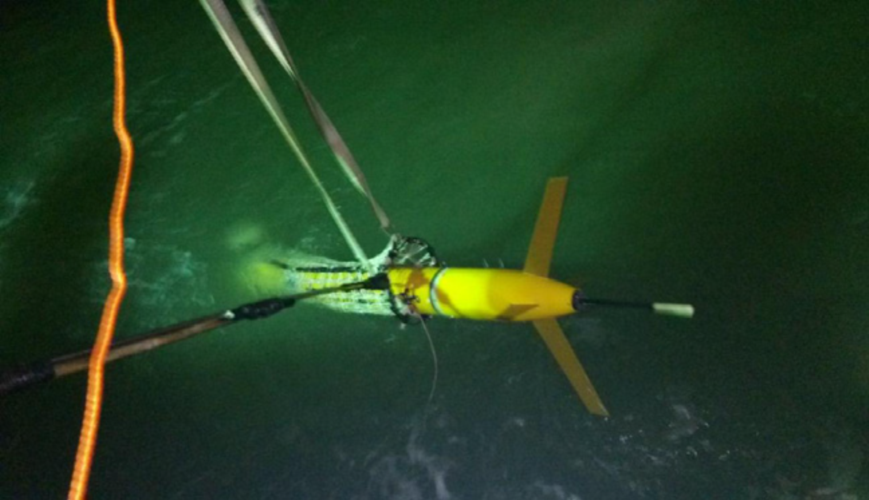
圖5 水下滑翔機海上試驗
該型滑翔機系統最大工作深度1500m,懸停或坐底時,最低工作頻率10Hz;滑翔時,最低工作頻率500Hz。設計指標為:在良好水文條件下,對水下聲源譜級不小于125dB(@1kHz)的目標,單節點探測作用距離不小于3km。
西北工業大學基于飛翼滑翔機研發了搭載多元聲壓陣列的飛翼滑翔機聲學探測系統,并進行了湖上測試。哈爾濱工程大學利用“海燕”水下滑翔機共裝載了4個聲壓水聽器,在滑翔機左翼、右翼、前導流罩和尾翼各安裝1個水聽器構成4元聲學感知單元,并在南海海域進行了海上試驗,利用73Hz低頻聲源信號對系統的探測能力進行驗證。試驗期間,水下聲學滑翔機共完成17個剖面的性能測試,其中滑翔機控制功能測試3個剖面,噪聲特性測試7個剖面,低頻聲源信號探測能力測試7個剖面,平臺最大下潛深度1000m。通過對記錄的噪聲數據進行分析表明,該聲學感知單元可有效接收低頻聲源發射的噪聲數據。
海軍潛艇學院和天津大學通過對現有“海燕”水下滑翔機進行聲學特性及電磁兼容性優化設計和減振降噪處理,集成矢量水聽器探測單元及其信號處理設備,設計水聲信號處理機艙室,研發了“海豚號”水下聲學滑翔機原理樣機(見圖6),該樣機可自主完成水中目標噪聲信息獲取、自主探測、聲學信號跟蹤、目標屬性自主判別及快速上浮,整個流程無需人工干預,初步具備對目標的自主探測能力。
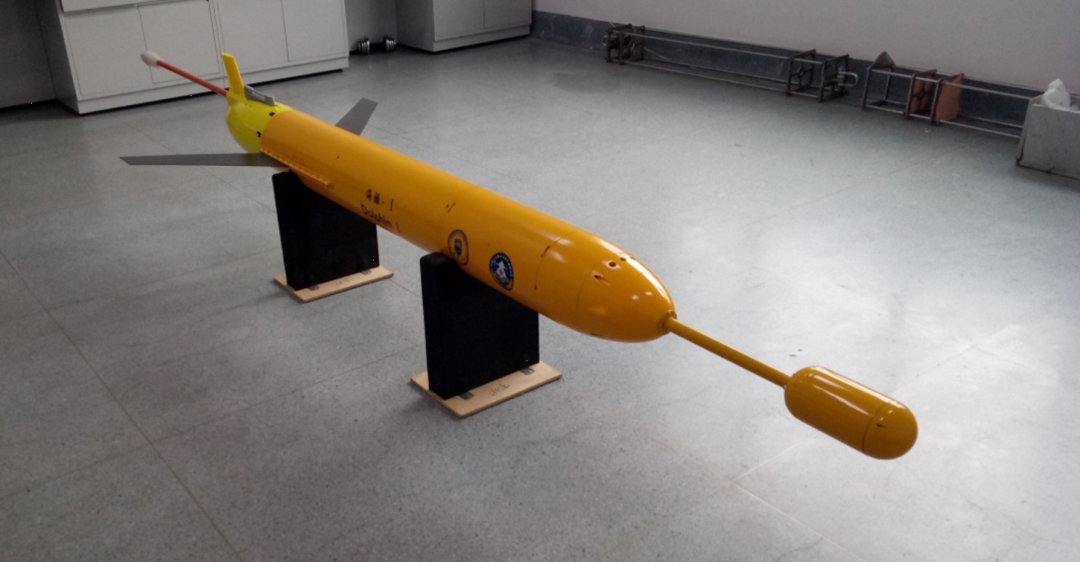
圖6 “海豚號”水下聲學滑翔機
二、系統組成及功能
⒈系統組成
水下聲學滑翔機一般由水下聲學滑翔機平臺分系統、任務載荷分系統、數據傳輸與通信分系統、甲板調試與控制分系統及布放回收分系統5部分組成。
⑴平臺分系統通過對自身浮力和姿態的調節來完成無動力水下滑翔,包括平臺主體結構子系統、浮力驅動子系統、姿態調節與能源子系統,以及導航與控制子系統,可承受一定的耐壓深度,具備任務載荷搭載能力;
⑵任務載荷分系統包括海洋環境觀測傳感器、聲學傳感器及水聲信號處理機,可完成海洋水文環境觀測和水下目標探測任務;
⑶數據傳輸與通信分系統包括衛星天線、接收機和控制軟件等,可實現水下滑翔機與甲板調試與控制分系統的水文環境與聲學數據近實時傳輸、任務指令下達和應急調度;
⑷甲板調試與控制分系統包括實時顯示與狀態監控、指揮與控制軟件、多源信息接入與處理、目標態勢展現等模塊,用于完成水下聲學滑翔機布放前設備測試與參數設置、布放后任務指令下達與遙測數據接收、水下聲學滑翔機狀態監控、指揮控制及應急機動調度以及探測目標態勢展現等任務;
⑸布放回收分系統主要包括多關節機械臂、可靠抓取機械手、可移動水面機器人等部分,用于水面船和無人水面航行器對水下聲學滑翔機的布放和回收。
相比于普通海洋環境觀測型水下滑翔機,水下聲學滑翔機主要具有如下特點。
①聲學與電磁兼容性更優。水下聲學滑翔機對系統噪聲、電磁兼容性要求更為苛刻,需要對系統進行聲學與電磁兼容性優化設計。
②水動力特性要求更高。水下聲學滑翔機由于加裝了聲學系統,平臺外形和整體結構會不同程度的改變,增加其水動力特性分析難度。
③信息處理更智能。除水下滑翔機常規導航、控制等信息自主處理外,聲學系統還需要具備目標自主探測和判別,并需要根據判別結果,完成同水下滑翔機主控系統的信息交互。
⒉系統功能
水下聲學滑翔機主要用于海洋環境精細化觀測、海洋環境噪聲測量和海洋目標監測,其具體功能如下:
⑴具有水聲環境長時序、大范圍和精細化測量功能,利用溫鹽深(CTD)剖面測量儀完成全面、準確和長時的三維空間溫度、鹽度和深度數據采集;
⑵具有海洋環境噪聲的測量與記錄功能,利用滑翔機搭載的水聲傳感器完成大范圍、長時效、多深度海洋環境噪聲數據的采集和記錄;
⑶具有水下移動目標聲學自主探測、聲學信號跟蹤、識別及信息回傳功能。
三、關鍵技術
⒈聲學減振降噪技術
水下聲學滑翔機結構復雜,包含較多的執行單元與結構件,且各單元的振動相互耦合,為復雜的多體系統,如何確認激勵源、確定振動的傳播路徑及各單元振動耦合情況,最終獲得聲學探測單元對此激勵源的響應情況,并據此開展有針對性的減振降噪,是水下聲學滑翔機目標探測應用亟需解決的關鍵問題。
2016年1月,我國學者在消聲水池測試了“海燕”水下滑翔機電池滑動、油泵啟動及螺旋槳推進等工況輻射噪聲級,并根據測試結果分析了水下滑翔機主要噪聲源,及噪聲對矢量水聽器各通道接收信號的影響,提出了水下滑翔機減振降噪技術方案,優化了水下滑翔機目標探測應用聲學系統工作時序。2016年8月,中科院聲學所在南海某海域開展了基于“海燕”水下聲學滑翔機的海洋環境噪聲觀測試驗,由于水下聲學滑翔機自噪聲影響,導致800Hz和1600Hz高頻段海洋環境噪聲譜級大于100Hz和200Hz的低頻段。因此,對水下聲學滑翔機各工況下的輻射噪聲進行有效測量,得到其自噪聲源分布及其特性,是指導減振降噪措施實施和平臺優化的前提。
⒉自主控制技術
自主控制技術是目前國際研究的熱點之一,決定著水下滑翔機的智能化水平與任務執行能力。由于水下滑翔機運行模式較為簡單,為保持其在續航能力方面的優勢,水下滑翔機一般搭載性能較低的單片機系統,難以運行大規模、復雜的人工智能算法。目前水下滑翔機自主控制技術研究主要集中在基于環境感知的自適應任務控制、軌跡規劃以及控制系統與聲學系統信息交互等方面。
鑒于水下滑翔機自身計算能力與通信等方面的限制,對于復雜的控制算法及大規模的編隊控制,大多借助岸基操控系統將計算結果發送給各水下滑翔機來實現對其的環境適應性控制。例如,通過水下滑翔機編隊返回的位置與溫度信息構建海洋溫度場模型,進行滑翔機導航控制,實現水下滑翔機編隊的環境自適應采樣控制;結合航路數據、海流及地理數據,進行滑翔機任務路徑規劃,避免發生與船舶相撞、擱淺等危險事故。通過增強水下滑翔機的軟硬件能力,可以在滑翔機上運行簡化的智能控制算法。例如,Lauren以Slocum水下滑翔機為基礎,研究了浮力自適應調節技術,滑翔機可以根據不同海域海水密度的變化進行自適應浮力調節;同時開發了安全回收算法,在水下滑翔機定位異常時,可以自行回到布放點等待回收。Hans等以Slocum水下滑翔機為基礎,研究了水下滑翔機環境自適應采樣控制策略,通過低功耗的傳感器進行海洋滑翔機測量,結合滑翔機內部存儲的物理海洋模型,進行特定海洋現象識別,并自主觸發高能耗的專業傳感器進行海洋現象測量,從而實現對水下滑翔機降耗的目的。水下滑翔機控制系統與聲學系統信息交互主要體現在聲學系統根據被探測目標的屬性信息,向主控系統傳輸是否應急上浮指令,如若需要應急上浮進行信息回傳,控制系統則向螺旋槳發送啟動指令,進行快速上浮。
⒊多模混合推進技術
傳統水下滑翔機通過浮力驅動,結合水動翼實現滑翔運動,功耗低,具有大航程、長續航能力等優點,然而水下滑翔機滑翔速度一般在0.5m/s左右,航行容易受海流影響,同時不能進行水平航行,作業能力受限。針對此,可通過集成螺旋槳等輔助推進裝置,使水下聲學滑翔機同時具有推進與浮力驅動2種驅動方式,以便在強流與低密度區域都可以進行輔助推進。多模混合推進技術為目前水下滑翔機研究熱點之一。例如,Joo建立了混合驅動水下滑翔機動力學模型,并對滑翔機的運動特性進行了仿真分析;Khalid等對混合驅動水下滑翔機進行了研究,并建立了其動力學模型,采用神經網絡控制算法對水下滑翔機進行行為預測控制;天津大學對水下滑翔機多模推進技術進行了系統研究,成功研發出“海燕”混合推進水下滑翔機。
⒋聲學傳感器設計及應用技術
聲學傳感器在水下聲學滑翔機集成應用需要突破工作深度和矢量水聽器緩動聲吶平臺應用2項瓶頸技術。
⑴聲學傳感器大深度技術
只有聲學傳感器實現大深度工作,才能真正實現水下聲學滑翔機長時效、長航程隱蔽偵察。從弱信號目標遠距離探測角度,面向于我國周邊海區,特別是南海應用的水下聲學滑翔機,在大深度工作可充分利用深海聲道軸能量聚焦效應,實現弱信號目標的遠距離偵察;還可以利用深海反轉會聚區,采用可靠聲路徑方法實現目標的遠距離探測。但上述功能的實現也不可避免地增加了聲學傳感器的體積和質量,影響了整體水動力特性,因此采用輕質耐壓材料和新型換能元件,以達到體積、質量和耐壓能力的折中,是聲學傳感器追求的終極目標。
⑵矢量水聽器緩動聲吶平臺應用技術
矢量水聽器應用在水下聲學滑翔機緩動聲吶平臺上時,由于受復雜海洋環境中內波、潮汐和大洋環流等影響,矢量水聽器及其聲吶平臺存在姿態變化,聲吶平臺上矢量水聽器探測的目標方位是相對于自身載體坐標系的方位信息,為得到目標的準確方位信息還需測量矢量水聽器相對于地理坐標系的實時姿態信息,通過姿態校正將目標方位信息轉換到地理坐標系。矢量水聽器姿態測量難題在一定程度上限制了其工程應用,能否準確獲取聲矢量傳感器實時姿態,是其實現工程應用的關鍵。
2007年,Clay等將傾角(俯仰角和滾動角)傳感器和航向角傳感器置于矢量水聽器內,使姿態傳感器和加速度傳感器單元軸向平行或重合,成功研制了具備姿態測量功能的TV-002型矢量水聽器,并開展相關海上試驗。笪良龍等通過研發微機電系統(MEMS)姿態傳感器,并將其集成應用于矢量水聽器設計,研發了適用于水下聲學滑翔機等水下緩動聲吶平臺的實時姿態測量矢量水聽器,并能直接得到探測目標相對地理坐標系的方位信息,成功解決了矢量水聽器在水下緩動聲吶平臺的應用難題。
⒌目標自主判別技術
水聲目標噪聲識別分類是水聲探測的“瓶頸”,同時也是關鍵技術之一,其流程是:傳感器或其陣列采集目標信號—數據預處理—特征提取—特征選擇—推理預測和識別分類。但傳統的水聲目標識別方法需要人工干預提取目標數據特征,這一過程需要操作者具有豐富水聲信號處理知識和專業經驗,才有可能提取出有價值的目標特征數據,并在此基礎上進行推理預測和識別分類。而水下聲學滑翔機、浮標等基于無人平臺的目標屬性判別,則是由信號處理設備自主完成,傳統水下聲目標識別分類方法已無法滿足此要求,因此,需要目標屬性判別具備智能化水平。
2010年,美國國防高級研究項目署(DARPA)啟動了“反潛持續跟蹤無人艇(ACTUV)”研究計劃,旨在研發一種可長時間在廣闊海域對低噪音常規潛艇進行探測、識別和跟蹤的新型無人水面艦艇,首艘技術驗證艇“海上獵手”號于2016年4月服役,首次實現了水聲目標自主識別,該型水聲探測裝備可進行自主決策,執行復雜的搜索、探測及跟蹤任務。
2015年10月,DARPA率先提出跨域海上監視和瞄準(CDMaST)計劃,旨在將現有反艦和反潛作戰中的探測、跟蹤、定位、識別、打擊及評估等作戰行動分解到廣泛分布的無人機、無人艇、無人艦,以及無人水下航行器等低成本、無人化的作戰平臺上,以迫使潛在對手投入更多資源成本開展體系對抗。國內,張少康等通過提取目標噪聲數據梅爾倒譜系數特征,構建長短時記憶網絡識別分類模型,初步實現了不依賴人工提取特征情況下的水聲目標智能化識別分類。
⒍安全布放和回收技術
水下滑翔機組網應用是達到海洋調查高分辨率要求的最好方法,同時也是實現一定區域目標探測的有效手段,目前很多任務中都有滑翔機網絡的身影。隨著水下滑翔機及其網絡應用的增加,滑翔機安全布放回收問題逐漸引起大家關注,特別是應用于目標探測的水下聲學滑翔機,由于其結構的改變,在一定程度上增加了布放與回收難度。水下滑翔機安全布放回收技術主要包括海上安全作業與布放回收策略兩方面。水下滑翔機在海上布放時為避免滑翔機與船相撞發生損壞,一般通過滑道或者吊繩迎風布放。水下滑翔機回收時根據其全球定位系統(GPS)位置進行搜尋,為確保安全回收,Slocum、Spray還裝有備用Argos信標,當發現水下滑翔機后,回收船慢慢靠近,并通過吊繩或下放小艇回收,在海況惡劣時也可通過吊網直接回收。在水下滑翔機布放回收策略方面,為實現多臺水下滑翔機的快速、高效回收,Enrique研究了水下滑翔機的軌跡規劃策略,回收船按規劃的航跡便可實現多臺水下滑翔機的快速回收。
四、結束語
水下聲學滑翔機利用凈浮力和調整姿態角獲得剖面滑翔推進力,平臺自身只在調整凈浮力和姿態角時消耗少量能源,具有功耗低、效率高、續航力強、維護費用低、可重復使用和大量投放等特點,其作為一種海洋移動觀探測設備,已廣泛應用于海洋安全體系和水文環境觀測體系建設。隨著能源優化策略、人工智能、大數據等科學技術的發展,水下聲學滑翔機必將在水下移動目標探測、戰場環境精細化測量與保障、基礎科學研究等領域發揮越來越重要的作用。
同國外先進水平相比,我國雖然在滑翔機研制領域有了長足的發展,但在物理機理分析、人工智能信息自主處理及自主協同組網探測等方面仍存在較大差距,這將是未來研究的重點。基于此,文中詳細梳理了國內外水下聲學滑翔機研究進展,探討了其設計及規模化應用涉及的多項關鍵技術,以期為國內同類水下無人探測裝備的系統開發提供參考。

(注:此文章由“溪流之海洋人生”微信公眾平臺編輯整理)
地址:北京市海淀區藍靛廠東路金源時代商務中心A座11E
電話:010-88895713
傳真:010-88891029
郵箱:info@shsbj.cn
